Robodoupě
 Robodoupě
Robodoupě
ANEB reportáž psaná na přednášce
- Robodoupě začalo jako vždycky - rozkládání projektů, rozkládání rukama a rozkládání o všem možném.
-


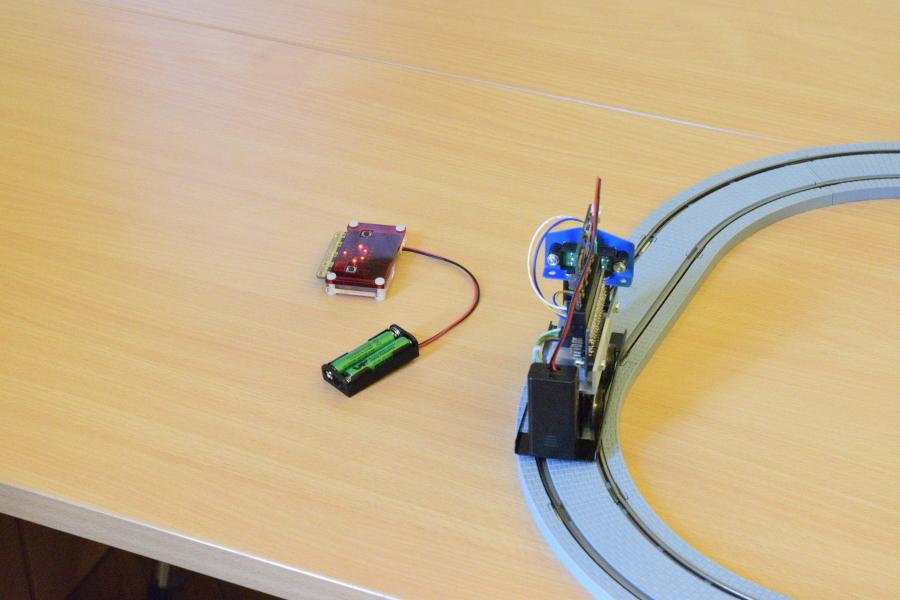
JRT přitáhnul mašinku na dálkové ovládání, na kterou Dex zkusil spáchat nájezd čínským tankem z čínské oceli, jako na náměstí Nebeského klidu.
 Naštěstí byl tank odkázán do příslušných mezí včas :)
Naštěstí byl tank odkázán do příslušných mezí včas :)
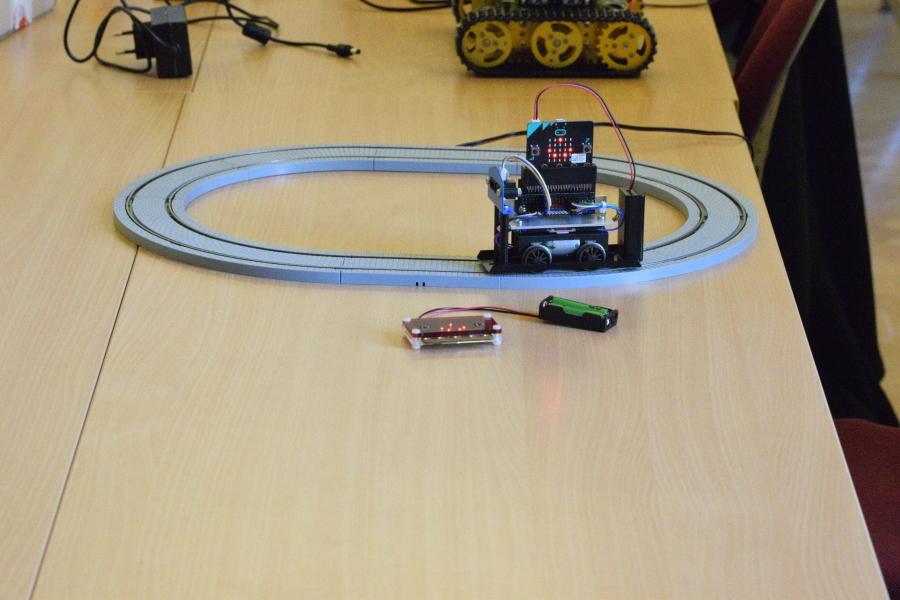
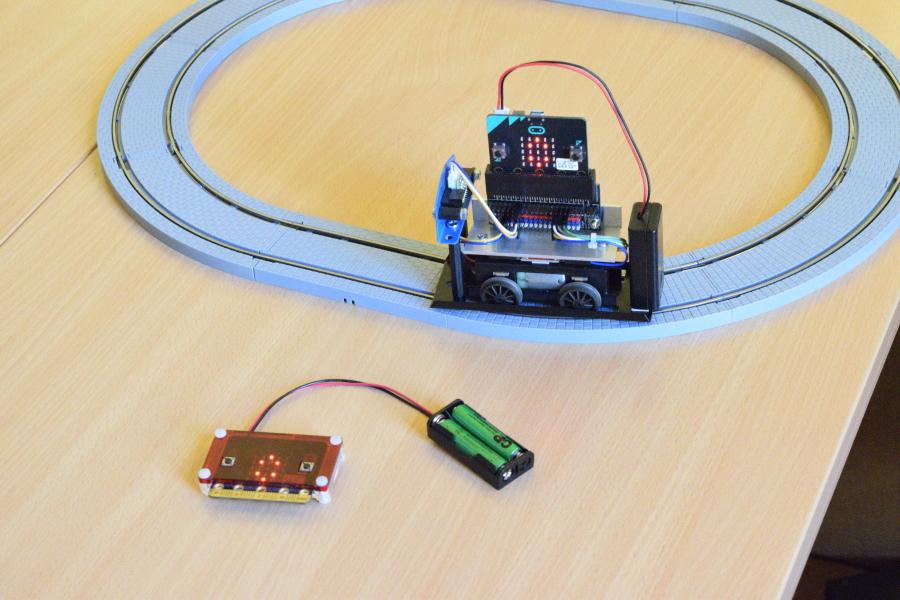
Kolejnice přežila i blízké setkání (3. druhu?) s výrazně větším robotem 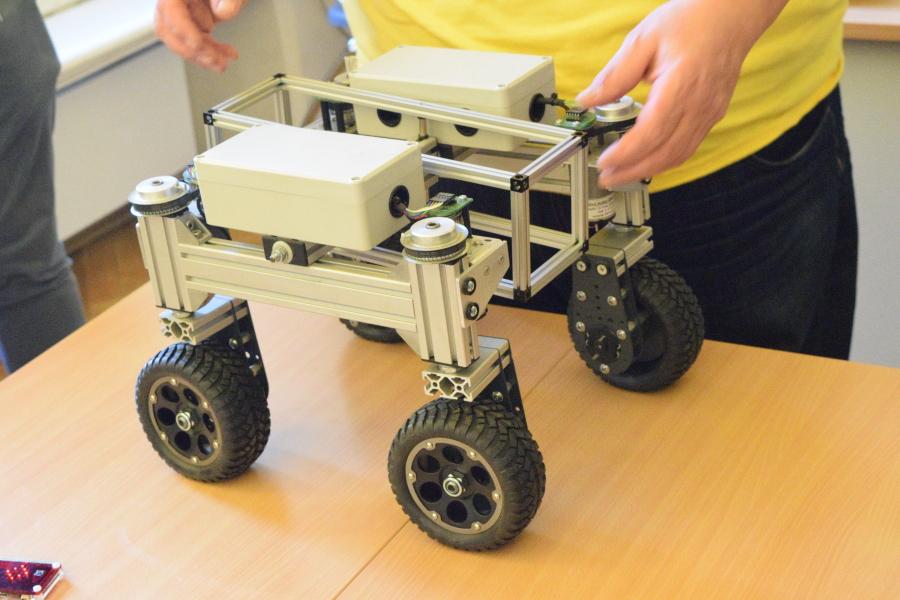
a vše skončilo smírně :

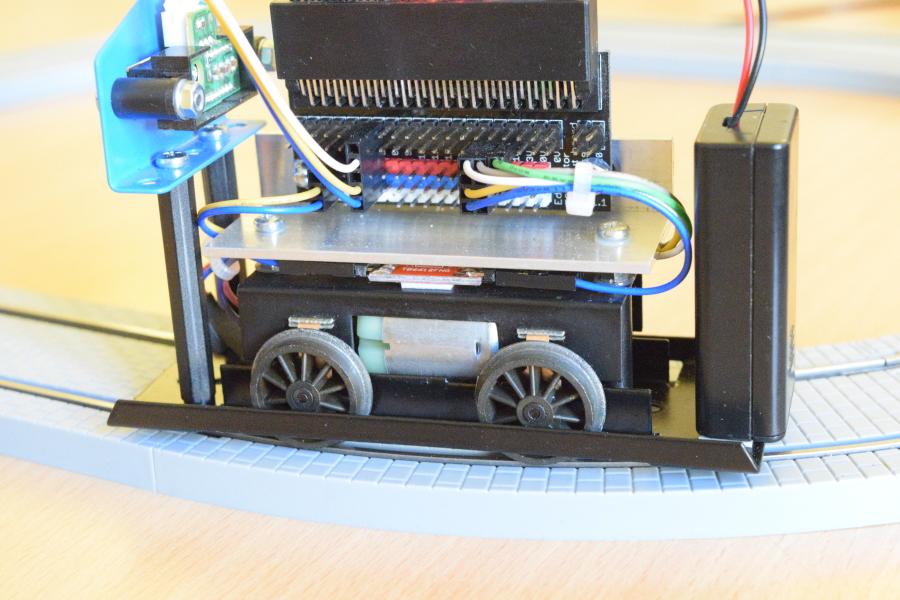
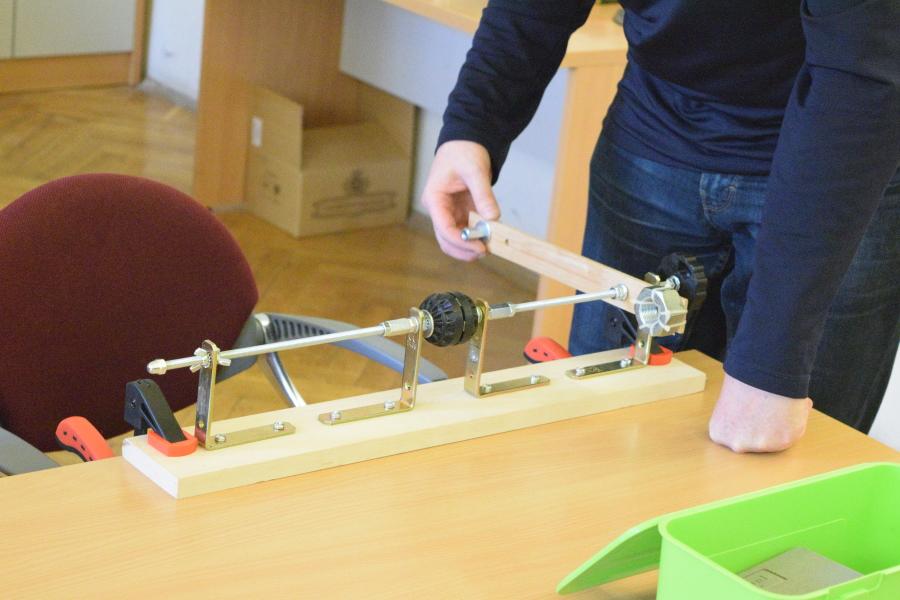
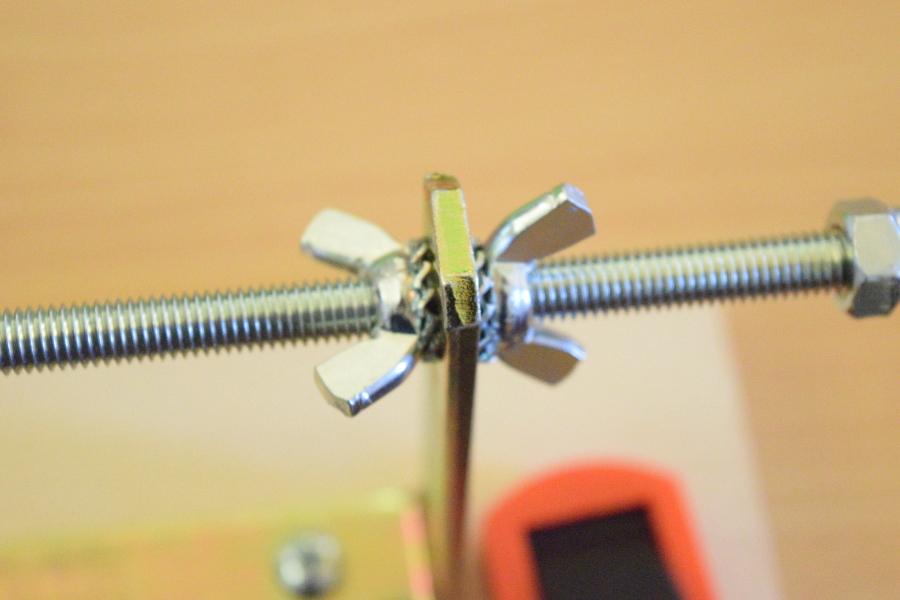
Kolbaba71 přinesl magnetickou spojku ke svítilně, drží vskutku skvěle (dokud nepřeskočí), jen pro demonstraci bylo nutno šrouby kromě zubatých podložek ještě navíc utáhnout kleštěma, jinak se dal demonstrovat jen přenos síly na druhou osu, která se - přez veškeré snahy jí v tom zamezit - vesele protáčela.


 Hanka zase přinesla spoustu barevných udělátek, na rozdíl od stávajícího trendu miniaturizace brouků za hranici manipulovatelnosti prostou rukou, někteří její brouci byli naopak značně rozměrní a
nepřehlédnutelní :)
Hanka zase přinesla spoustu barevných udělátek, na rozdíl od stávajícího trendu miniaturizace brouků za hranici manipulovatelnosti prostou rukou, někteří její brouci byli naopak značně rozměrní a
nepřehlédnutelní :) 

Průběžně se objevila i spousta dalších konstrukcí a lidí, některé si představíme později.
Čas byl využit i k odborným osobním konzultacím nad aktuálními problémy.



Pohony nejen pro roboty
Martin Locker nám pověděl o pohonech nejen pro roboty. Důležité parametry jsou
cena
rozsah a řízení rychlosti, případně i síla
Také o výhodách a nevýhodách
krokových motorů (snadné řízení, ale jsou těžké a žerou)
stejnosměrných motorů (nejběžnější - levné, často potřebují převodovku, protože mají vysoké otáčky a nemají zpětnou vazbu
BLDC - bezkomutátorové - nejnižší váha, ale velmi vysoké otáčky a horší řízení
Motory lze sehnat nejrůznějšími způsoby, v nejhorším případě i koupit
DC motory
Snadno najdeme
napětí U (chodí i na nižší)
krouticí moment Mr (v různých otáčkách je různý) - v podstatě kolik to utáhne
výkon P (většinou maximální, ale mimo úzké rozmezí to moc neříká) (a často tam jsou nesmysly)
Lepší je, když je to pro různé režimy, protože to dává lepší obraz
Krouticí moment Nm (nikoli N/m, nebo kg*cm ) - síla na páce dané délky - na delší je menší a naopak
Přibližný výpočet síly motoru:
trakční odpory (valení - bez pohonu se to zastaví)
zrychlení (potřebujeme ho taky rozjet v nějakém příčetném čase)
síla pro stoupání (když jedeme do kopce)
Motor by se měl používat mezi body maximální účinnosti a maximálního výkonu - (níž to je nevyužité, výš to jen zbytečně topí)
Dále předvedl i výpočet parametrů motoru a tragické porovnání s realitou, kde čínské jednotky prohrály s jednotkama SI v poměru asi 1:3.14
 Ve volném čase si někteří snažili sobecky cosi ukutit sami pro sebe, zatímco druzí jim nezištně radili, jak by to udělali mnohem lép, kdyby to dělali sami.
Ve volném čase si někteří snažili sobecky cosi ukutit sami pro sebe, zatímco druzí jim nezištně radili, jak by to udělali mnohem lép, kdyby to dělali sami.
David přednáší o terminálu Arduina. Jeden problém je, že si každý odladí aplikaci s defaultem 9600 což je pomalu a když se to pak vypne, tak nechodí různé delaye. Navíc Arduino spolehlivě zvládá mnohem víc (viz Robodoupě).
Další je putty a potřebuje ho i Drákula. Jinak se běžně používá pro SSH a další, ale jde i pro seriál. Navíc umí emulovat VT100 a tudíž i dělat barvičky.
Protože jsme zlobili, tak nám ještě nejdřív ukáže Teraterm, což je hodně starý terminál, kde ale lze nastavit kódová stránka. Napsal ho jakýsi japonec, kterému nestačily běžné terminály s ASCII a z nějakého důvodu chtěl text japonsky.
Nejlepší je ovšem Realterm, který umí nastavit vše možné a mnohé další. Jako echo, barvičky, hexadecimální kódy, I2C, posílání předpřipravených dat, či souborů. Nastavení plné sériové linky (pokud ji počítač má), capture dat do souboru ... Jen pozor, změnu nastavení je třeba potvrdit pomocí Change..
Doporučuje 1010b z 0xA hardcore programátorů :)
Další možnost je 'copy con com3:' nebo tak nějak, jinak na linuxu používám běžně screen. Nebo se prostě v programu otevře soubor a komunikuje se s ním. A ostatní zmínili ještě tak půl tuctu jiných možností.
Navíc některé USB-Serial převodníky umí jen některé rychlosti a není tak zcela jasné, které které a které které ne. Případně při nastavování rychlosti tak trochu podvádějí a občas to pak chodí nebo taky ne.